Research Projects
(Active)
2023.03 – 2028.02 보행자 안전을 위한 무선신호 기반 비가시경로 사물 인지 기술 개발, 한국연구재단 신진연구 (연구책임자)
2024.03 – 2029.02 미래형자동차 융합SW 전문인력양성, 한국산업기술진흥원 (공동연구원)
2024.09 – ICT자동차융합연구센터, 한국연구재단 대학중점연구소 (공동연구원)
2025.04 – 디지털 레이더 피드백을 활용한 인간 사고 방식 기반 자가 복원력 있는 초장기 위험 예측 자율주행 개발 (공동연구원)
(Completed)
2024.04 – 2024.12 고주파 대역 Integrated Sensing and Communication (ISAC) 활용 기술 연구, SK Telecom (연구책임자)
2024.07 – 2024.11 무선 신호 거리 측정 기반 3차원 위치 추정 알고리즘 연구, 한국철도기술연구원 (연구책임자)
2022.06 – 2024.08 메타버스 가상서원 구축을 위한 딥러닝 기반 전통기록물 해독, 한국연구재단 선도연구센터 (공동연구원)
2023.07 – 2023.12 6G 후보수파수 전파특성 및 RF 진화 기술 연구, SK Telecom (연구책임자)
2022.06 – 2023.05 자율적 실내 위치 서비스 도입을 위한 학습 기법, 한국연구재단 기본연구 (연구책임자)
Artificial Intelligence for Wireless

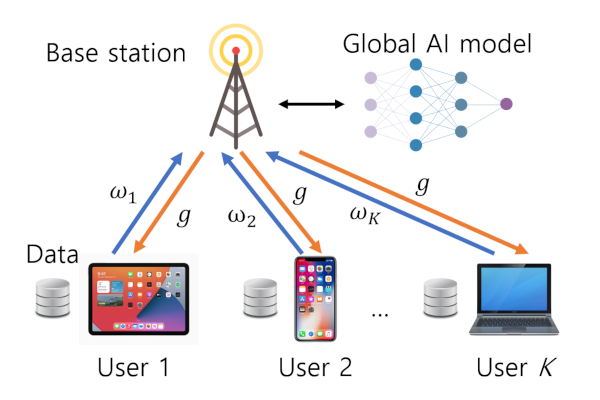
AI has great potentials to improve the performance of conventional communication systems. It can enhance the performance of each block of communication systems or jointly optimize the whole transmission and reception procedure, such as so called end-to-end (E2E) communication systems. In addition, AI can break the limitations in conventional communication systems by efficiently exploiting additional information, such as sensor readings from mobile devices. Our effort in this topic include intelligent transmission/resource allocation techniques, distributed machine learning over wireless, etc.
Positioning and User Data Processing Pipeline
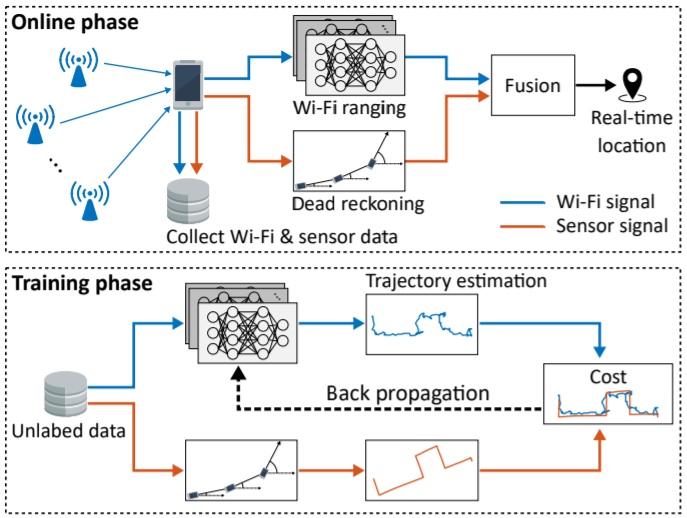
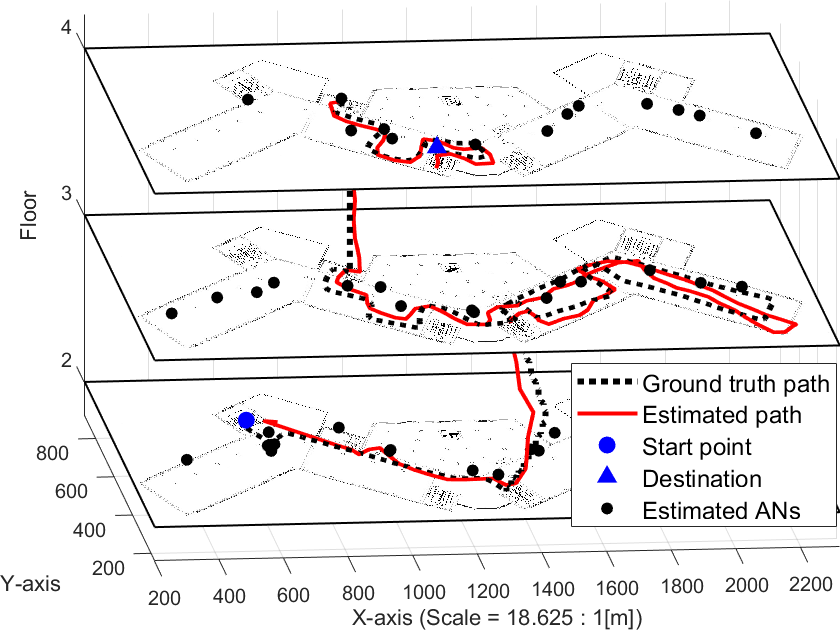
Location information are essential for many applications in our daily life, such as navigation, vehicle/asset tracking, sharing/delivery services, autonomous driving, etc. Unlike outdoors where GPS works well, there is no single positioning solution for indoors, and thus, various components, such as wireless, motion sensors, and vision/LiDAR sensors, have been used to locate mobile devices indoors. More importantly, almost every positioning solution requires a site survey process because the structures and characteristics of each indoor site are unique. We are working on this topic in two directions: (a) developing AI-based and sensor fusion positioning solutions using wireless and motion sensors and (b) designing big data processing pipeline to automatically perform site survey process using unlabeled from numerous mobile users. This will remarkably minimize human intervention for deploying positioning solutions.
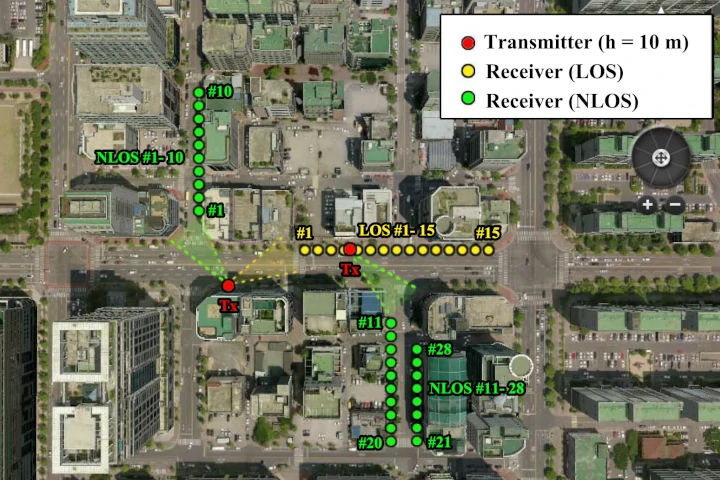
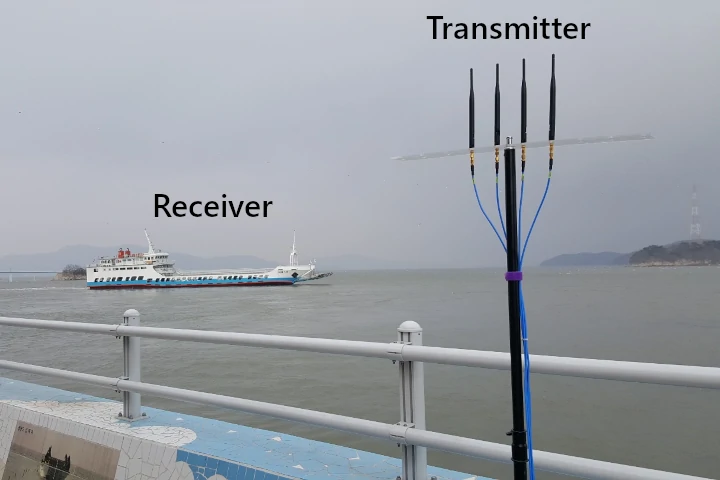
Automotive Radar Signal Processing

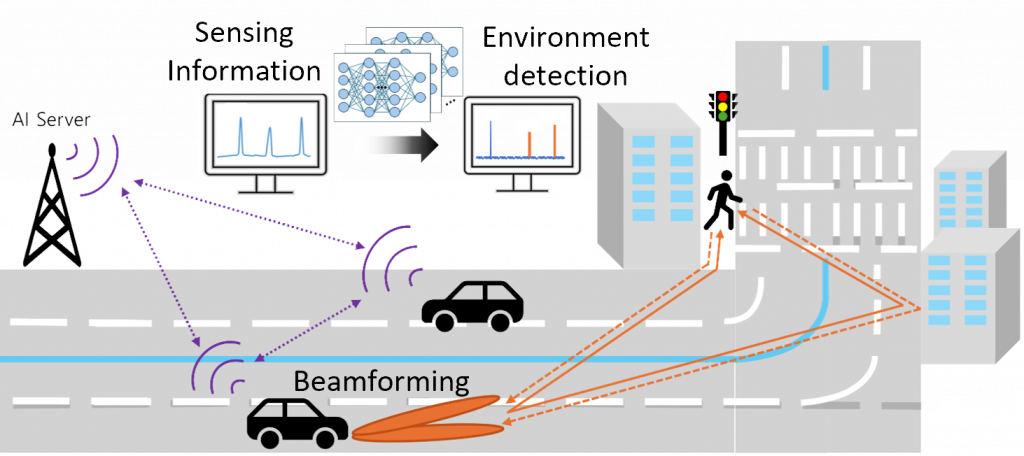
Perceiving surrounding environments is one of key requirements for autonomous driving systems. Even though vision sensors play an important role in detecting objects, their limitations in detecting distance/speed of objects and being able to see in poor weather conditions (e.g., rain, fog) make autonomous driving systems have additional sensors like radars. The latest radar sensors that consist of a large number of antenna arrays enable to create an image similar to a LiDAR point cloud and thus have ability to detect surrounding objects. Furthermore, unlike vision/LiDAR sensors, radar sensors utilizing electromagnetic waves that undergoes various propagation mechanisms including reflection and diffraction may detect occluded objects (e.g., pedestrian behind a building) to improve the safety of the road. Our effort in this topic include radar perception and non-line-of-sight (NLOS) object detection, etc. To validate these capabilities, we employ physics-based ray-tracing simulations that emulate real-world propagation environments, as well as hardware prototyping using a software-defined digital radar implemented on the Xilinx RFSoC platform.
Past Research Area
The past research areas include radio propagation channel measurement/modeling for sub 6GHz and mmWave frequency bands, indoor/outdoor ray-tracing simulation, and design of various transmission techniques for wireless communication systems. More information on past research can be found here – publication (past papers).

Demo Video
Real-time demonstration of an ISAC (Integrated Sensing and Communication) system at the 2025 MWC
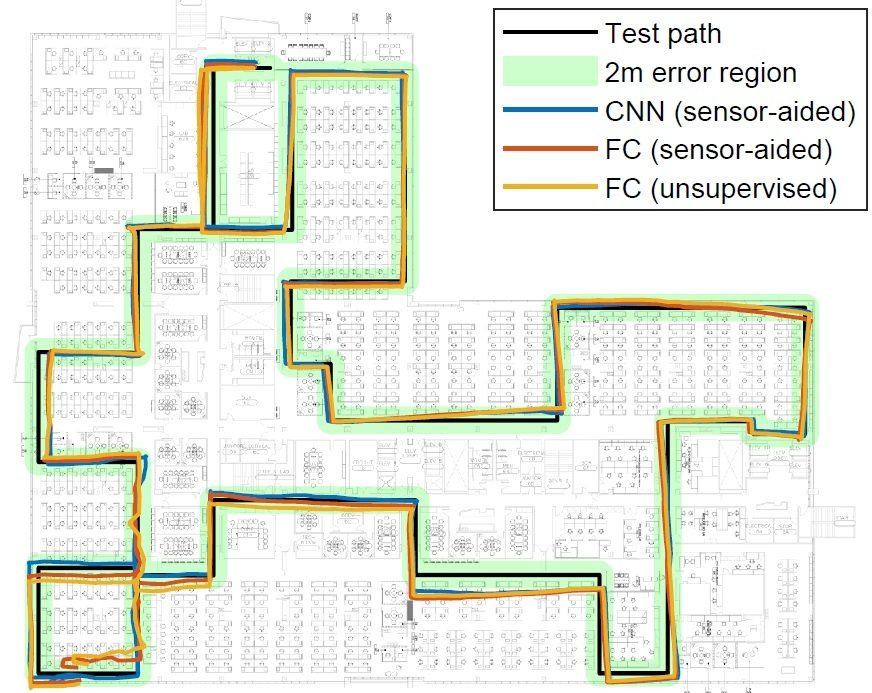
Wi-Fi and motion sensor-based mobile navigation demo at Intel Santa Clara Campus
Refer to our paper [J17] for details
Refer to our paper [J19] for detaill